Arduino UNO、L298Nドライバー、IRセンサー搭載のラインフォロワーロボットカー
による管理者
–
2020年11月4日

Arduino UNO、L298Nモータードライバー、IRセンサーを使ってArduinoラインフォロワーロボットカーを作る
この簡潔な解説記事では、 Arduino UNOと2つの赤外線センサーモジュールを使って、ラインフォロワーロボットカーの作り方を紹介します。ラインフォロワーという名前は、まさに完全自動運転車を意味します。このロボットカーは、床面やあらゆる表面に埋め込まれた視覚的なライン(通常は白または黒)に沿って走行します。
このプロジェクトはマイクロコントローラ、特にArduinoをベースにしています。マイクロコントローラなしでもラインフォロワーロボットを開発することは可能です。ただし、機能は制限され、停止速度はマイクロコントローラベースの車両よりも低くなります。
マイクロコントローラのデータ処理能力は、単純なオペアンプICよりも優れているためです。これは、基本的なラインフォロワーロボットのプロジェクトレポート(PPT)になります。
YouTubeビデオを見る:
こちらはMake DIY YouTubeチャンネルの動画です。動画を最後までご覧いただくと、プロジェクトを再現しやすくなります。
https://www.youtube.com/embed/2PA0f5edKsM?feature=oembedIRセンサー、Arduino Uno、L298Nモータードライバーを搭載したArduinoラインフォロワーロボット
ラインフォロワーロボットカーはどのように動作するのでしょうか?
これはマイクロコントローラーを搭載したシンプルな車です。仕組みを詳しく説明しましょう。この車は2つの赤外線センサーで構成されています。
このセンサーは、線の色によって反射するかどうかを検知します。ここで反射とは、表面が光を反射することを意味します。この場合、反射面は白い表面です(反射しない表面は黒い線のみです)。つまり、黒い線は光を反射しないということです。
センサーの仕組みは、反射光があるかどうかを感知することです。反射光があるかどうかでセンサーの出力が決まります(出力には2種類あります。これについては後ほど説明します)。反射光がない場合、赤外線センサーは出力を出力しません。つまり、出力は低くなります。
この高出力と低出力の結果に基づいて、マイクロコントローラは車を制御できます。
マイクロコントローラは、車にどこへ行くか、いつ曲がるか(左または右)とどこで停止するかの方向を伝えます(2 つのセンサーが黒い表面を取得した場合、車を停止するようにマイクロコントローラに指示するようなコードを作成しました)。
Arduinoラインフォロワーロボットカーに必要なもの
Amazon.com リンク
- IRセンサー: https://amzn.to/2TjUr1j
- Arduino UNO R3: https://amzn.to/34ejTf9
- L298N モータードライバー: https://amzn.to/3oc750H
- TTギアモーター:https://amzn.to/2TcV9NV
- ジャンパーワイヤー: https://amzn.to/2Hk1oNF
- 18650バッテリー: https://amzn.to/3m7Irwy
- 2S、18650 バッテリーホルダー: https://amzn.to/2TehpXS
- TTモーター用65MMホイール:https://amzn.to/3dRy2C7
- はんだごて:https://amzn.to/37qwcqE
- グルーガン: https://amzn.to/2HnnUoV
Amazon.in リンク
- IRセンサー: https://amzn.to/2TaSsfZ
- Arduino UNO: https://amzn.to/31sEgU4
- L298N モータードライバー: https://amzn.to/37qwcqE
- TTギアモーター:https://amzn.to/2FLFeTF
- ジャンパーワイヤー: https://amzn.to/2HqWHBb
- 18650バッテリー: https://amzn.to/34hsldt
- 2S、18650 バッテリーホルダー: https://amzn.to/2TdA1XY
- TTモーター用65MMホイール:https://amzn.to/31rrghv
- はんだごて: https://amzn.to/2HldvtF
- グルーガン: https://amzn.to/3mcr51m
人気カテゴリー:
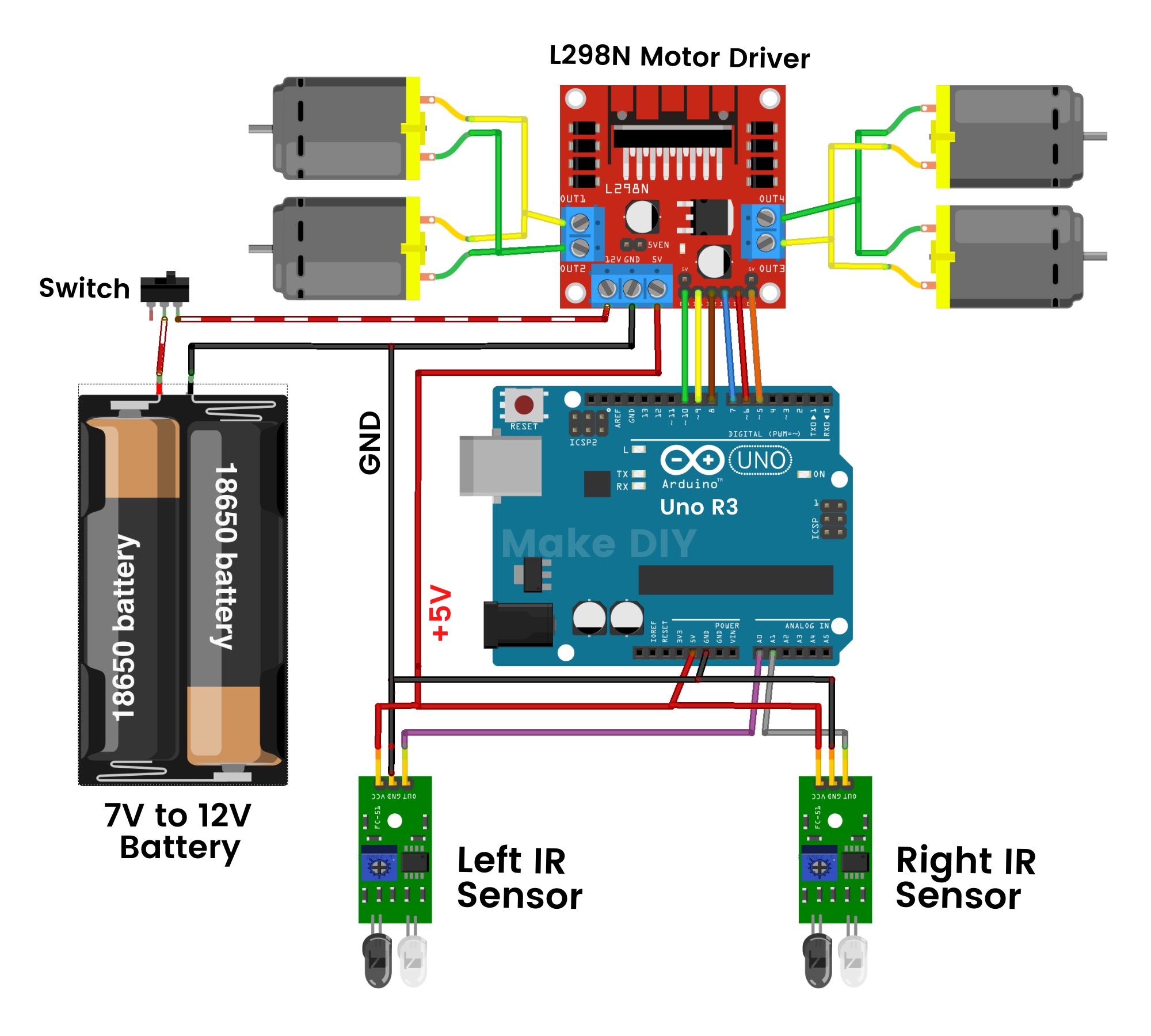
Arduino ラインフォロワー ロボットカーの回路図:
車を作る手順:
ステップ1:
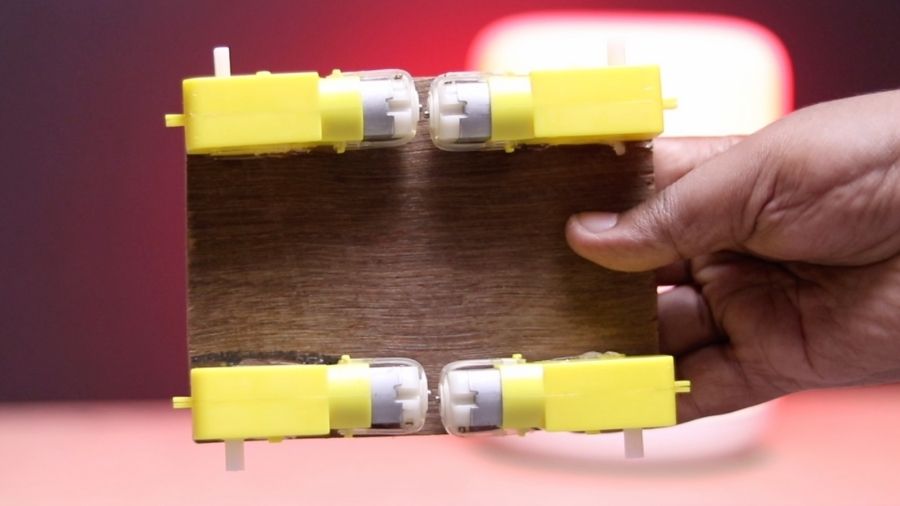
まず、車のシャーシとなる木片が必要です。ここでは13cm x 10cmの合板を使用しています。この寸法はTTモーターカーを作るのに最適です。アクリル板や既製のシャーシも使用できます。

ステップ2:
グルーガンなどの接着剤を使って、合板の四隅にモーターを取り付けます。モーターを取り付ける際は、モーターの位置が合っていることを確認してください。合っていないと、車はまっすぐ走りません。
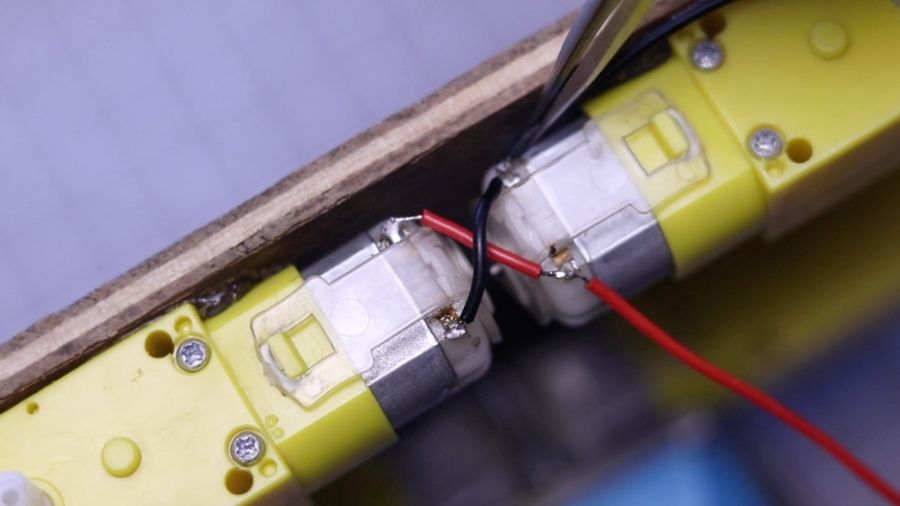
ステップ3:
TTギアモーターを下図のように接続します。モーターは十字形に接続します。これは、前進、後進、その他の既知の方向に進むために、両側のモーターが同じ方向に回転するように車を作る必要があるためです。
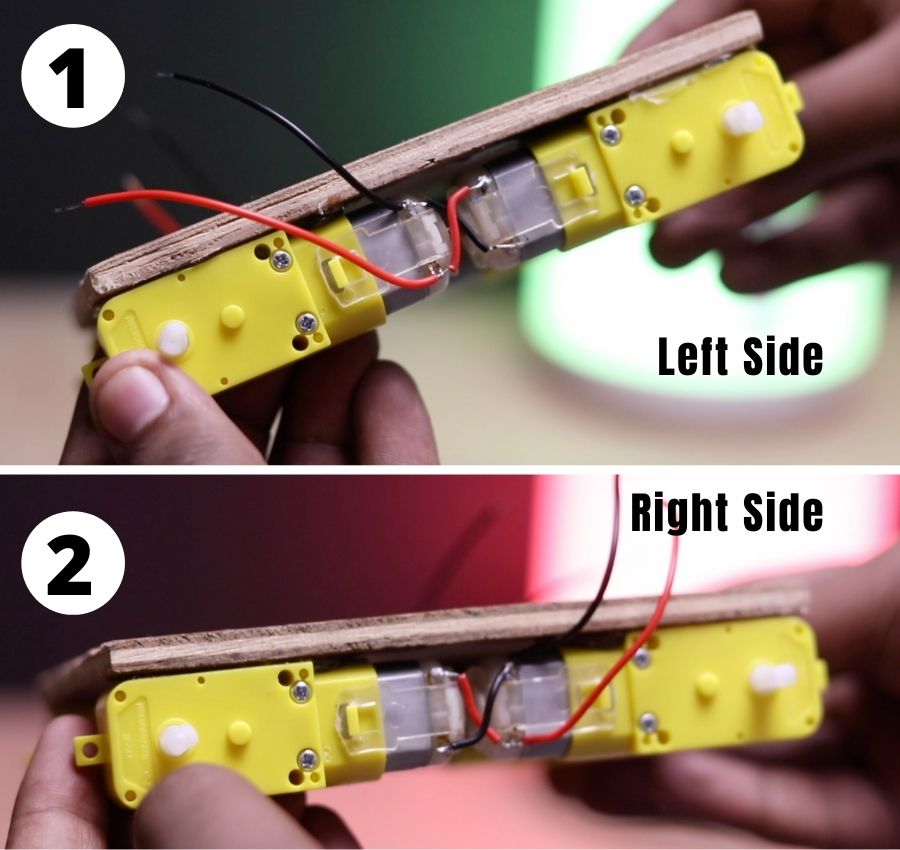
ステップ4:
モーターを接続すると、接続は次のようになります。ここでは、何が起こっているのかを明確に理解していただくために、両側の写真を掲載しました。
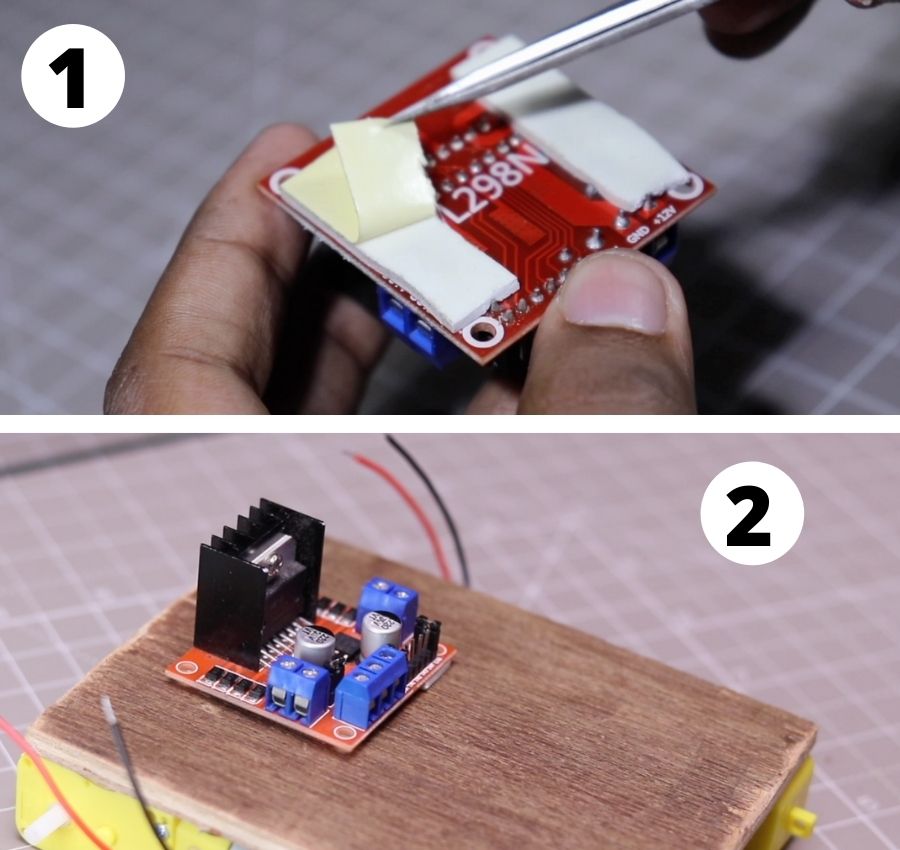
ステップ5:
ここではL298Nモータードライバーを使用します。L298Nモータードライバーを合板に固定するために両面テープを使用しました。ナットとボルトでも接続できます。
ステップ6:
モーターの配線をL298Nモータードライバーに接続します。モータードライバーの配線をしっかりと締め、緩みのない接続を心がけてください。
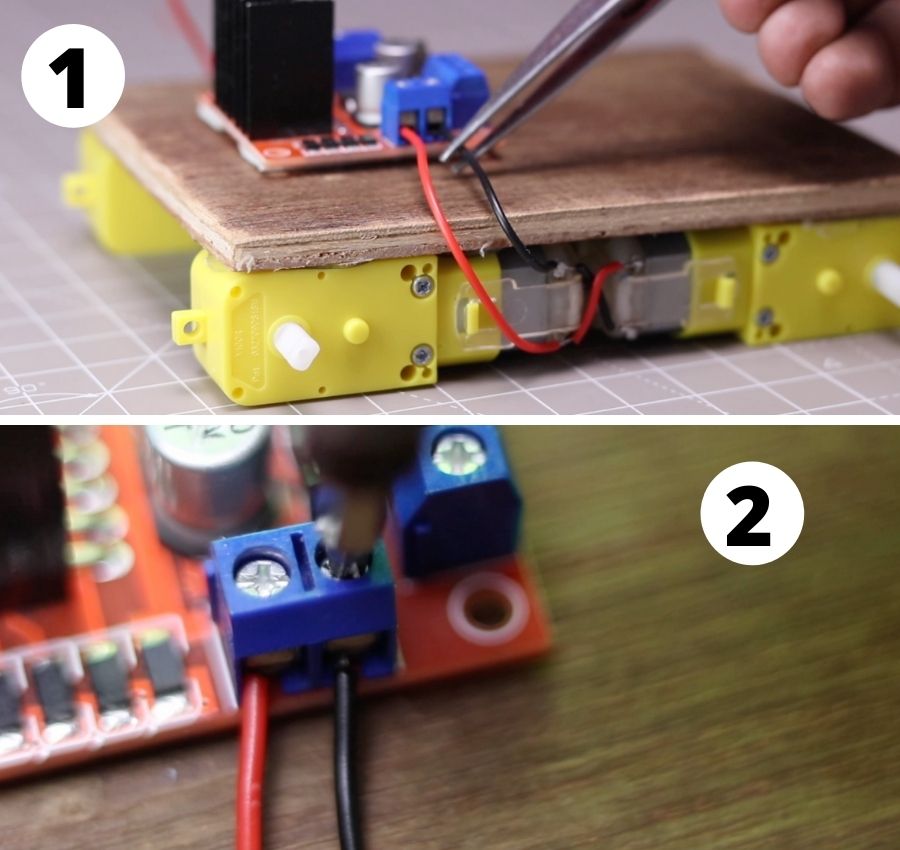
接続後、すべてのワイヤは次のようになります。
注:コードをアップロードした後、車が正しい方向に進まなかったり、間違った方向に回転したりする場合は、モーターの配線を交換してください。そうすれば、問題なく動作します。
ステップ7:
バッテリーには18650バッテリーを2個使用します。このタイプの車を作るのに最適です。バッテリーの接続には、2セルの18650バッテリーホルダーを使用します。また、車の電源のオン/オフ用のスイッチも追加しました。
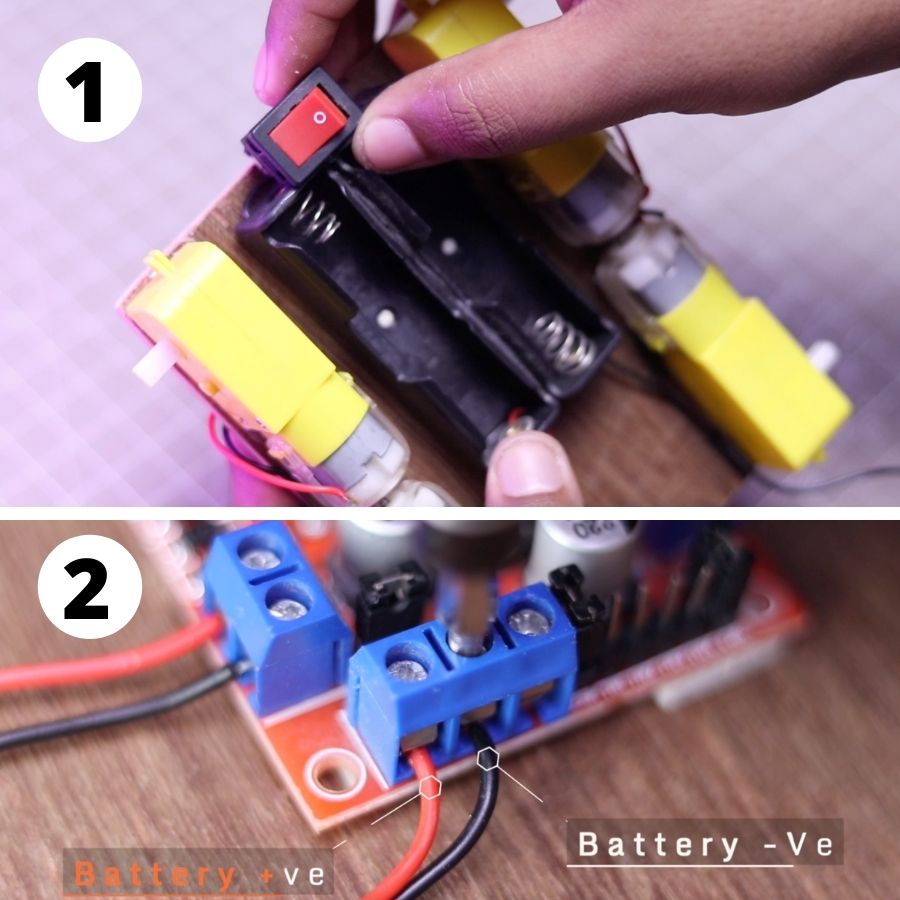
バッテリーの配線はモータードライバーの入力配線に接続されます。バッテリーの配線をどこに接続するかは、図から明確に分かります。
ステップ8:
このプロジェクトでは、マイクロコントローラーとしてArduino Unoを使用しています。ご希望に応じて他のマイクロコントローラーを使用することもできますが、その場合は配線図が異なります。
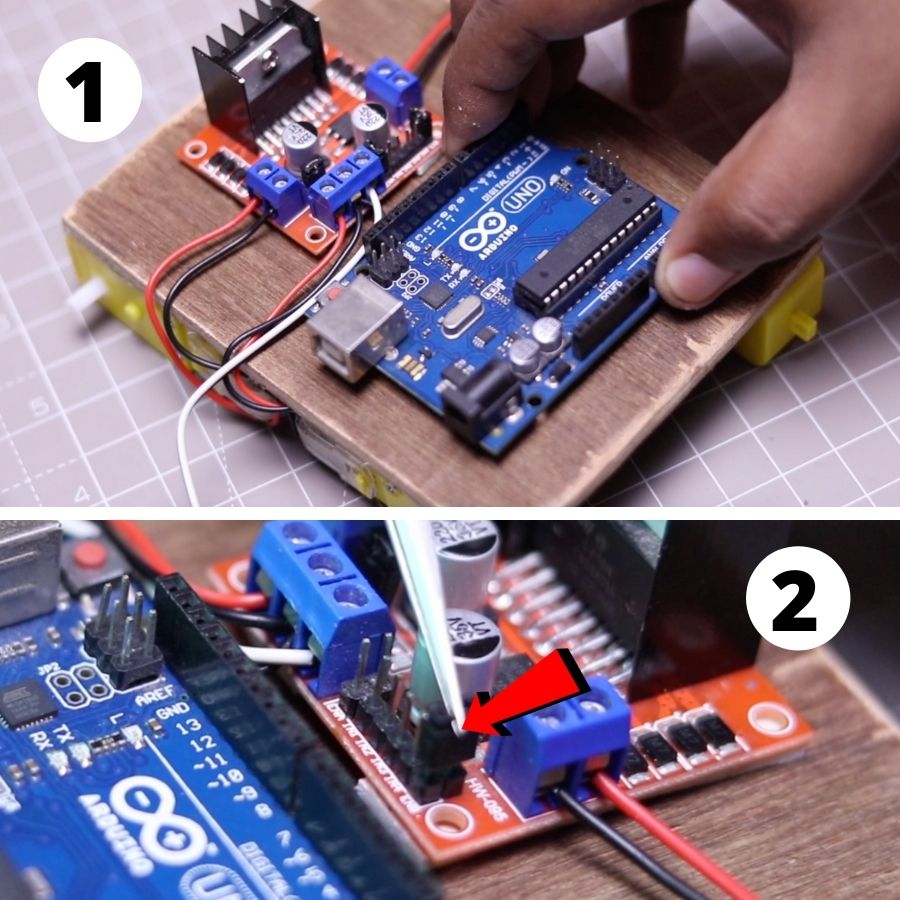
次に、接続の次のステップに進むために、モーター ドライバーからジャンパー短絡コネクタを取り外す必要があります。
ステップ9:
写真では、モーター ドライバーに必要な接続について説明しました。
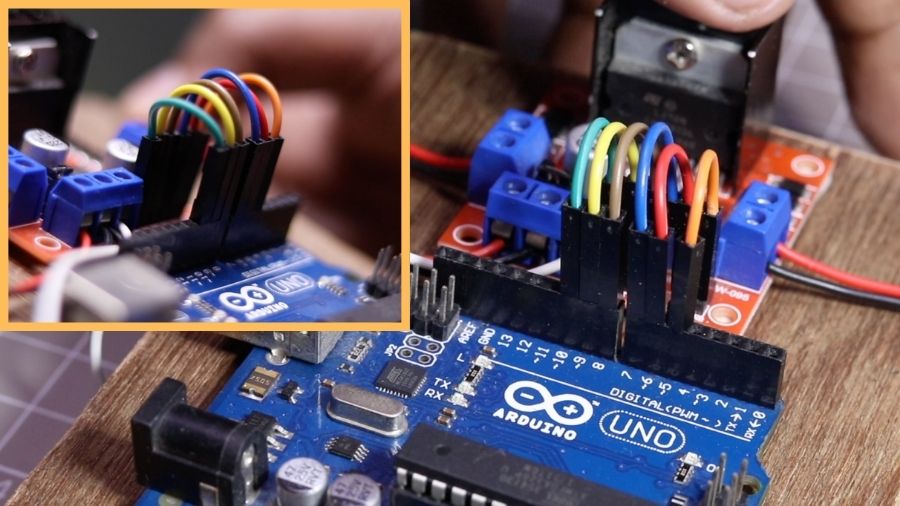
| アルドゥイーノ・ウノ | L298N モータードライバー |
| ピン10 | エナ |
| ピン9 | IN1 |
| ピン8 | IN2 |
| ピン7 | IN3 |
| ピン6 | IN4 |
| ピン5 | ENB |
ステップ10:
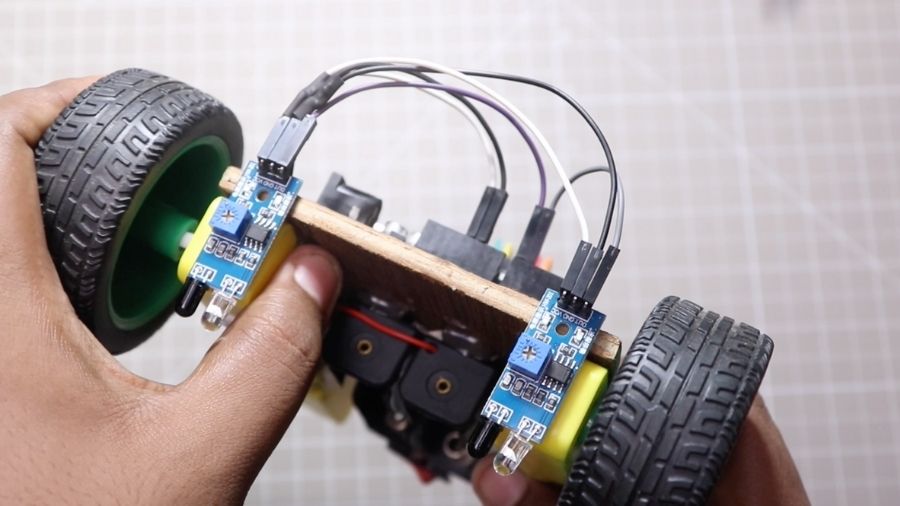
写真のように赤外線センサーを接続します。次に、Arduino UNOに必要な配線を接続します。回路図の配線図に従ってください。
コードをArduinoにアップロードします。次は、車を走らせるためのキャリブレーションを行います。
ステップ11:
バッテリーを車に接続し、スイッチをオンにします。

ステップ12: (センサーのキャリブレーション) *** 重要***
キャリブレーションを行う前に、ホイールを車に接続する必要があります。キャリブレーションのためにシリアルモニターを開く必要はありません。手動キャリブレーションです。ここでは、digitalRead関数を使用して明暗を区別しています。そのため、赤外線センサーはHigh/Lowを出力します。
車を高い場所に置きます。ここでは、スプレー塗料のトップカバーを使ってキャリブレーションを行いました。ここでは、白い表面とT字型の線を使ってキャリブレーションを行いました。(T字型に何を使ったか気になる方、答えは黒の絶縁テープです。)
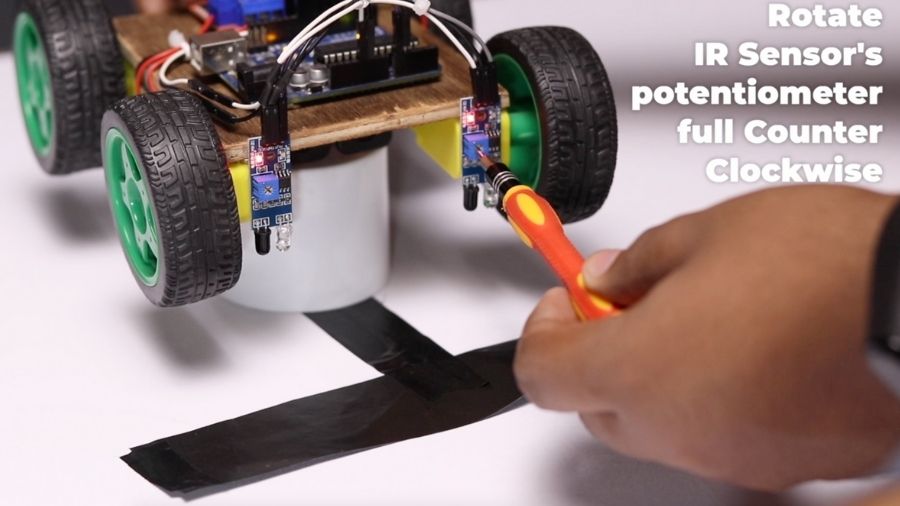
写真のように車を配置します。これでキャリブレーションの準備が整いました。まず、2つのポテンショメータ(左右のセンサー両方)を反時計回りにいっぱいに回します。
- 次に、IR センサーの LED がオンになるまで、ポテンショメータを 1 つずつゆっくりと時計回りに回します。
- 次に、車の左と右のセンサーが黒い線に合うように、車をゆっくりと左右に動かします。すると、車輪が異なる方向に回転します。
- 具体的には、左のセンサーを黒線に当てると、車は右方向に進もうとします。同様に、右のセンサーが暗い場合、車は左方向に進みます。
- これは、車を常にブラックライン上に配置するためです。この構成の大きな欠点の一つは、この構成ではスピードが出すぎないことです。初心者向けのプロジェクトとしては最適です。
この場合、キャリブレーションのプロセスは少し簡単になります。これで、車のエンジンをかけて、追跡したい場所に置くだけで、車はラインに沿って進みます。
Arduino ラインフォロワーカーコード:
車が正しい方向に進まない場合の簡単なトラブルシューティング:
もしこのようなことが起こり、車が正しい方向に進まない場合は、コードを変更する必要はありません。モータードライバーの配線を変更するだけで、車は正しい方向に進むようになります。
簡略化された PCB:
Follow me!